












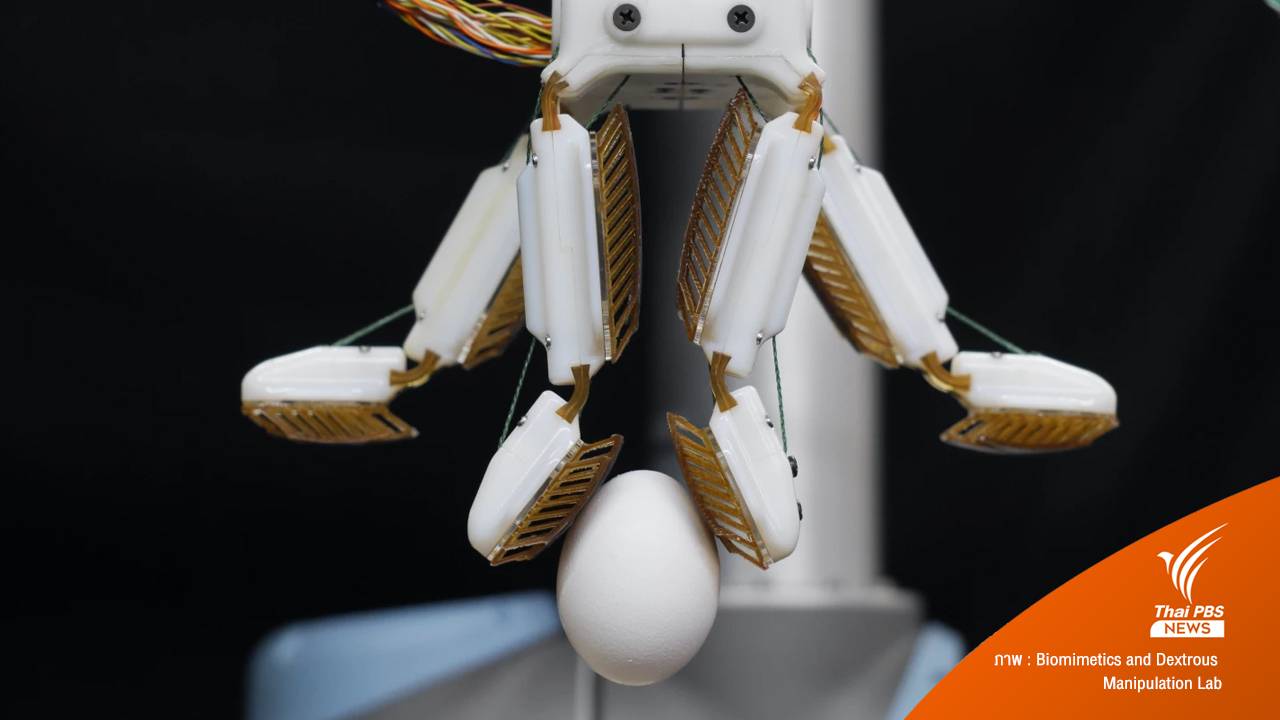

ทีมนักวิจัยหุ่นยนต์จากมหาวิทยาลัยสแตนฟอร์ด ประเทศสหรัฐอเมริกา เปิดตัวการวิจัยพัฒนา farmHand แขนหุ่นยนต์รูปแบบใหม่ล่าสุดได้รับแรงบันดาลใจจากตีนตุ๊กแก แขนหุ่นยนต์สามารถหยิบจับและสัมผัสวัตถุที่นุ่มนวล แก้ปัญหาแขนหุ่นยนต์รูปแบบเดิมที่มักมีปัญหาหากต้องการใช้หยิบจับวัตถุที่ละเอียดอ่อน เช่น ผลไม้ที่มีผิวด้านนอกบาง ไข่ไก่ที่สามารถแตกได้ง่าย แขนหุ่นยนต์พร้อมถูกพัฒนาต่อยอดเพื่อนำไปใช้งานในอุตสาหกรรม
ก่อนหน้านี้นักวิทยาศาสตร์ทราบกันมานานแล้วถึงสาเหตุที่ทำให้ตีนตุ๊กแกสามารถยึดเกาะผนังและสิ่งของต่าง ๆ เนื่องจากบริเวณฝ่าเท้ามีเส้นขนขนาดจิ๋ว เรียกว่า ซีเทย์ (Setae) จำนวนมากเพื่อสร้างปรากฏการณ์ไฟฟ้าสถิต ทำให้ตีนของตุ๊กแกสามารถยึดเกาะได้อย่างดีเยี่ยม นอกจากการนำลักษณะดังกล่าวของตีนตุ๊กแกมาใช้พัฒนาแขนหุ่นยนต์ ยังมีการนำไปใช้พัฒนาวัสดุยึดจับ เช่น เทปตีนตุ๊กแก และวัสดุยึดจับอื่น ๆ
สำหรับการจำลองลักษณะของซีเทย์ของตีนตุ๊กแก นักวิจัยได้ใช้เทคโนโลยีเครื่องพิมพ์ 3 มิติ ช่วยในการขึ้นรูปวัสดุที่มีขนาดเล็กละเอียดอ่อน เพื่อติดตั้งเข้ากับแขนหุ่นยนต์ที่เชื่อมต่อกับคอมพิวเตอร์ เทคโนโลยีเครื่องพิมพ์ 3 มิติเป็นตัวแปรสำคัญที่ทำให้งานวิจัยประสบความสำเร็จ
นอกจากความสามารถของแขนหุ่นยนต์ farmHand เลียนแบบตีนของตุ๊กแกที่ทำให้สามารถยึดเกาะวัตถุอย่างเหนียวแน่น แขนหุ่นยนต์ยังสามารถลดความเสียหายที่เกิดขึ้นกับวัตถุที่ถูกหยิบจับ เนื่องจากใช้แรงบีบที่กระทบกับวัตถุเบาบางเพียงเล็กน้อย ซึ่งมีความสำคัญเป็นอย่างมาก หากมีการประยุกต์ใช้แขนหุ่นยนต์ดังกล่าวกับการผลิตในภาคอุตสาหกรรม ที่ต้องการความรวดเร็วในกระบวนการทำงาน แต่จะต้องไม่มีข้อผิดพลาดทำให้สินค้าเสียหาย
ปัจจุบันแขนหุ่นยนต์ farmHand อยู่ในขั้นตอนของการวิจัยพัฒนา โดยทีมงานได้ตีพิมพ์ผลการวิจัยลงวารสาร Science Robotics เมื่อวันที่ 15 ธันวาคม 2564 และแขนหุ่นยนต์ อยู่ในขั้นตอนการพัฒนาเพิ่มเติม เพื่อนำไปใช้งานเชิงพาณิชย์ โดยพร้อมร่วมมือกับบริษัทเอกชนที่ให้ความสนใจ
ที่มาข้อมูลและภาพ: New Atlas, Stanford University
“รอบรู้ ดูกระแส ก้าวทันโลก” ไปกับ Thai PBS Sci & Tech
แท็กที่เกี่ยวข้อง: